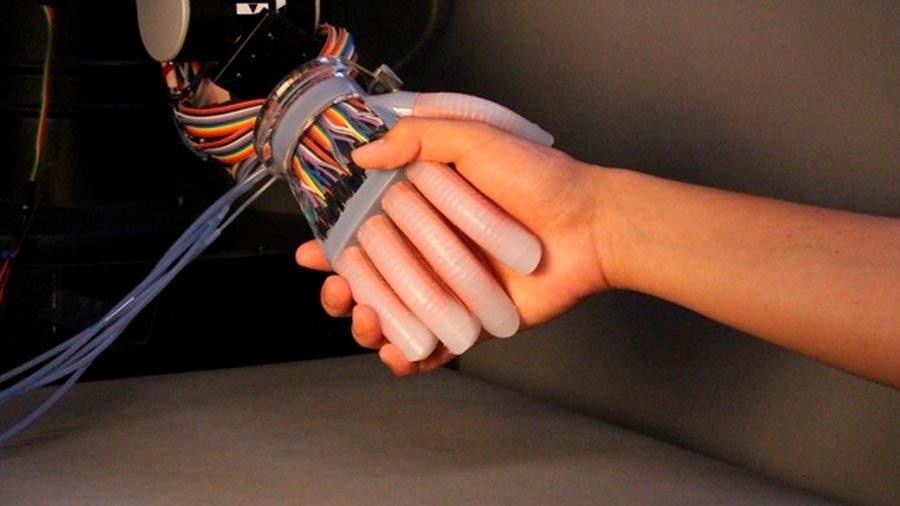

Los científicos de la École Polytechnique Fédérale de Lausanne (Suiza) están desarrollando una nueva tecnología para mejorar el control de las manos robóticas, en particular para los amputados, que combinan el control individual de los dedos y la automatización para mejorar el agarre y la manipulación.
La tecnología combina dos conceptos de campos diferentes. La implementación de ambos juntos nunca se había hecho antes para el control manual robótico. Esta prueba de concepto interdisciplinaria entre neuroingeniería y robótica se ha probado con éxito en tres amputados y siete sujetos sanos.
La neuroingeniería implica descifrar el movimiento intencionado del dedo de la atividad muscular en el muñón del amputado para el control individual del dedo de la mano protésica. La robótica permite que la mano robótica ayude a agarrar objetos y mantener contacto con ellos para un agarre robusto.
“Cuando sostienes un objeto en la mano y comienza a resbalar, solo tienes un par de milisegundos para reaccionar”, ha explicado Aude Billard, que dirige el Laboratorio de Algoritmos y Sistemas de Aprendizaje de EPFL. “La mano robótica tiene la capacidad de reaccionar dentro de los 400 milisegundos. Equipada con sensores de presión a lo largo de los dedos, puede reaccionar y estabilizar el objeto antes de que el cerebro pueda percibir que el objeto se está deslizando”.
Cómo funciona el control compartido
Los investigadores han explicado que el algoritmo primero aprende a decodificar la intención del usuario y lo traduce al movimiento de los dedos de la mano protésica. Para entrenar el algoritmo, el amputado debe realizar una serie de movimientos de la mano. Los sensores colocados en el muñón del amputado detectan la actividad muscular, y el algoritmo aprende qué movimientos de las manos corresponden a qué patrones de actividad muscular. Una vez que se comprenden los movimientos de los dedos previstos por el usuario, esta información se puede utilizar para controlar los dedos individuales de la mano protésica.
“Debido a que las señales musculares pueden ser ruidosas, necesitamos un algoritmo de aprendizaje automático que extraiga actividad significativa de esos músculos y los interprete en movimientos”, ha explicado Katie Zhuang, primera autora de la publicación.
A continuación, los científicos diseñaron el algoritmo para que esta automatización robótica se activara cuando el usuario intentaba agarrar un objeto. Cuando un objeto entra en contacto con los sensores en la superficie de la mano protésica, el algoritmo traslada la orden de cerrar los dedos.
Tal y como han indicado los investigadores, este agarre automático es una adaptación de un estudio previo para brazos robóticos diseñado para deducir la forma de los objetos y agarrarlos basándose solo en información táctil, sin la ayuda de señales visuales. Por ahora, el algoritmo aún se está probando en un robot provisto por una parte externa.
“Nuestro enfoque compartido para controlar las manos robóticas podría usarse en varias aplicaciones neuroprotésicas como las prótesis de mano biónicas y las interfaces cerebro-máquina, aumentando el impacto clínico y la usabilidad de estos dispositivos”, ha asegurado Silvestro Micera, presidente de la Fundación Bertarelli de EPFL en Neuroingeniería Traslacional, y profesor de bioelectrónica en Scuola Superiore Sant’Anna.
Fuente: infosalus.com